53,809 total views, 3 views today
以前、レゴテクニックのパーツを利用したメカナムホイール車を作った。
3Dプリンターでレゴ(LEGO)用メカナムホイールを作った
オムニホイールのWi-Fiラジコンカーを3Dプリンターで自作した(ESP32)
スマホで操作できるメカナムホイールのWi-Fiラジコンカーを作った(ESP-WROOM-02)
せっかくメカナムホイールを使っているのだから、キッチリ真横や斜めに移動してほしいところだが、このときは横移動や斜め移動の具合がイマイチだった。
なので、もっとキッチリ真横や斜めに移動できるメカナムホイールのラジコンを作ることにした。
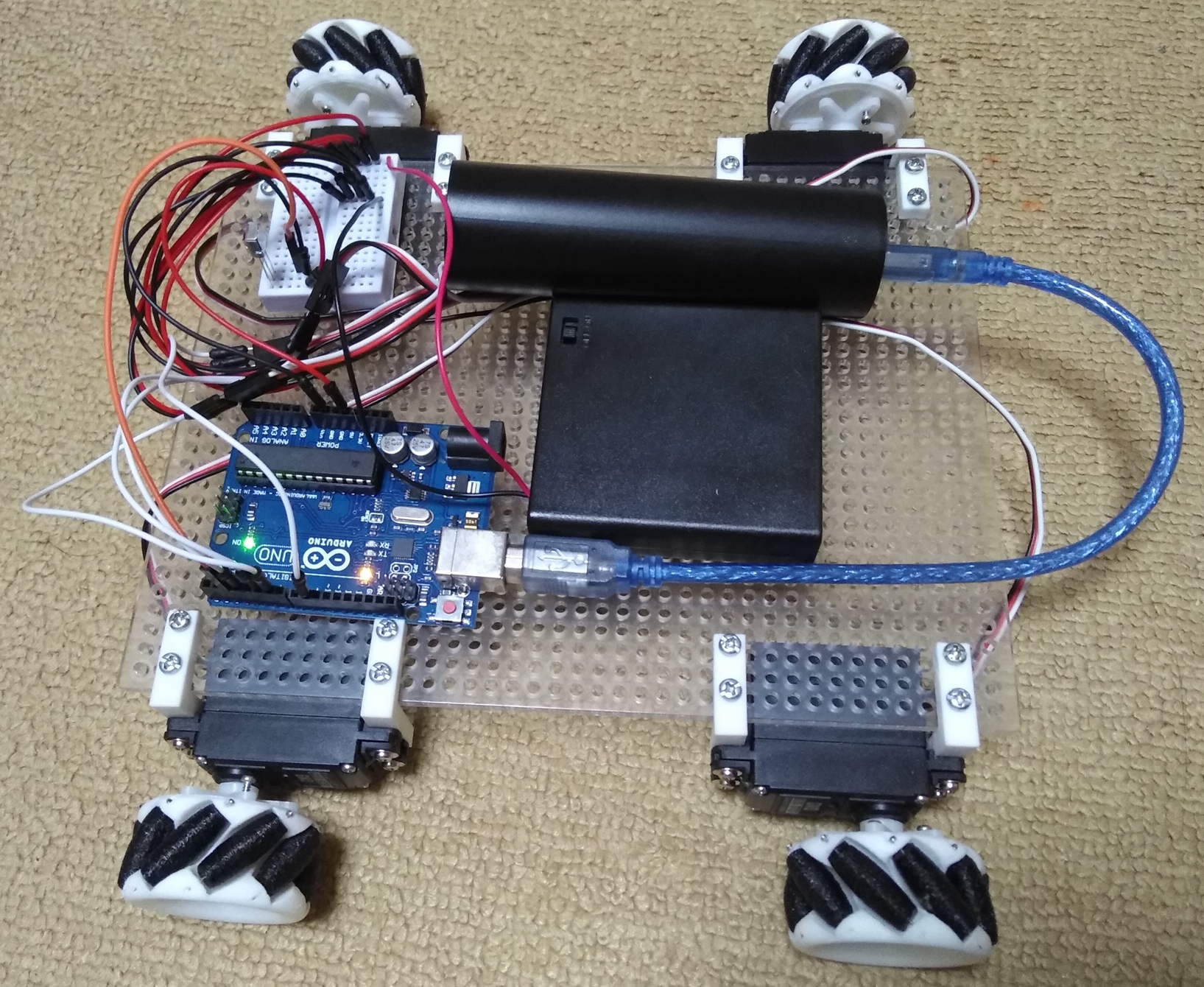
そうして完成したのがこちら↓
目次
動作
リモコン越しに動いている様子
横移動多め
使用パーツ一覧
| パーツ | 使用品 |
|---|---|
| Arduino | Arduino Uno互換機 |
| 車体 | 透明 ユニバーサルプレートL |
| タイヤ | PLAフィラメント TPUフィラメント |
| ローテーションサーボ | S35 STD |
| サーボマウント | PLAフィラメント |
| 赤外線 | 受信モジュール リモコン |
| バッテリー | Anker PowerCore 5000 |
| 電池ケース | 単3×4 スイッチ・カバー付 |
| ブレッドボード | 4.5×3.5 cm 白 |
| ジャンパワイヤ | オス-オス |
Arduino Uno互換機
以前購入したラズベリーパイ用のパーツセットの中に、赤外線受信モジュールとリモコンがあったので、それとArduino Uno互換機を利用する。
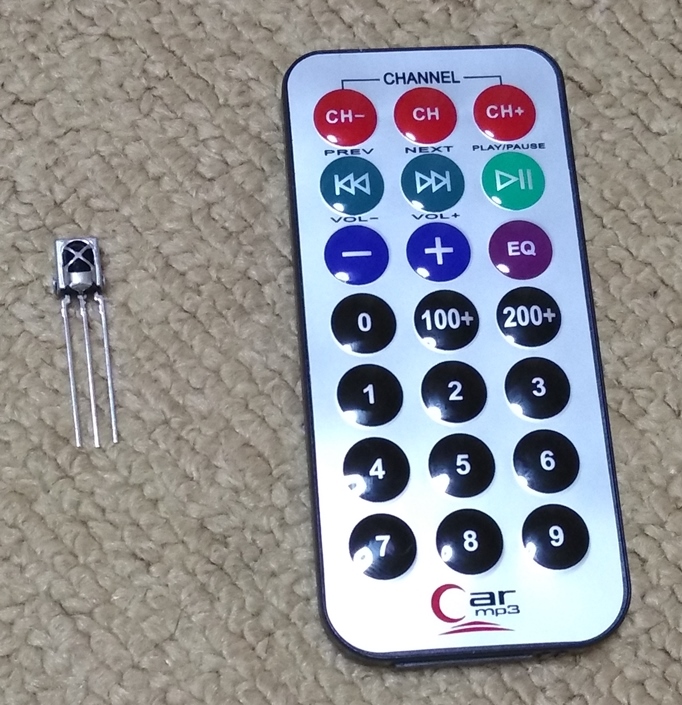
(赤外線受信モジュールとリモコン)

(Arduino Uno互換機)
ローテーションサーボ
ローテーションサーボは通常のサーボモータと異なり、あらかじめ決められた角度までしか回らない、ということはなく、DCモータのようにずっと回り続けるタイプのモータである。
LEGO用メカナムホイールのとき真横に移動できなかったのは、モータの出力差によってモータごとの回転数に差が生じたためではないかと考え、今回は、タイヤの回転数に差が生じなさそうで、かつ、割りと安価に手に入りそうなローテーションサーボを使用することにした。
なお、タイヤ1つにつきモータ1つ、計4つのモータ必要となるが、サーボモータを使用する場合、必要となるGPIOピンの数がDCモータの場合よりも少なくて済む。
GWSの「S35 STD」というモータが安かったので、それを使うことにした。

(ローテーションサーボ)
メカナムホイール
ホイールについては、例によってThingiverseで良さそうなのを探し、3Dプリンターで出力して使う。
色々と探してみた結果、評判が良さそうな44mm Mecanum Wheel (Small, Solid and Low Cost)を試して見ることにした。
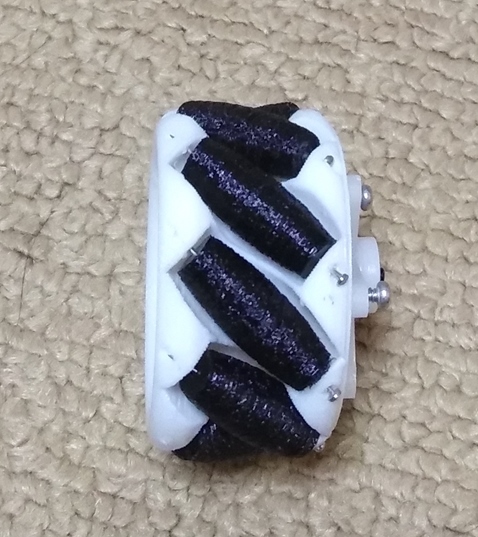
(メカナムホイール:ローラー面)


車体
車体には、タミヤの「透明 ユニバーサルプレートL」を使用した。
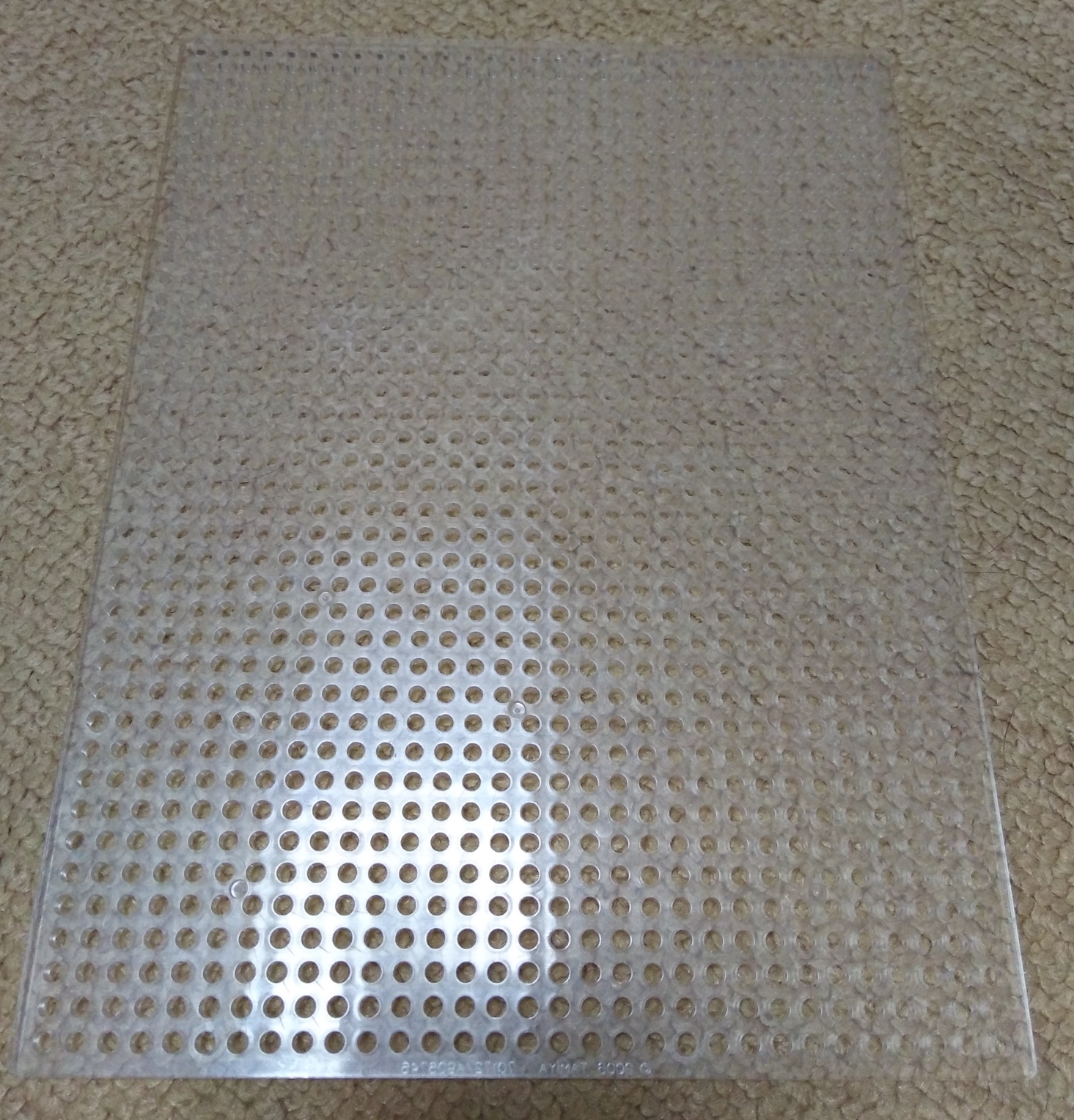
(透明なユニバーサルプレートL)
サーボモータマウントパーツ
そのままでは、サーボモータをユニバーサルプレートに上手く取り付けることができないので、簡単なL字型のマウントパーツを自作した。
自作マウントパーツのデータについては、以前作った自作のスマホケース同様、Thingiversにアップした。
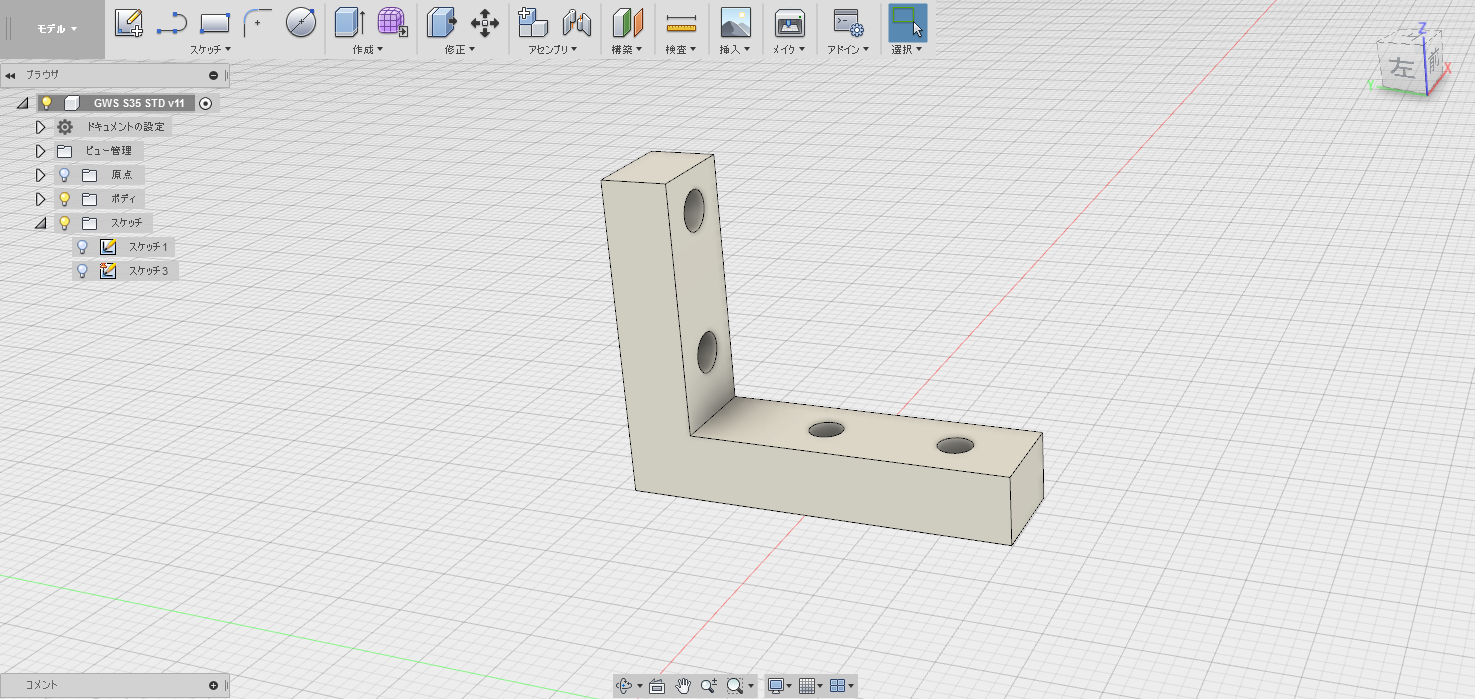
(マウントパーツ:3モデル)

(マウントパーツ:実物)

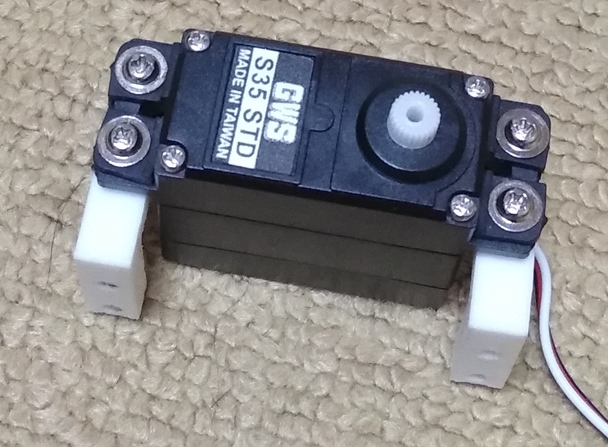
(サーボモータに固定)
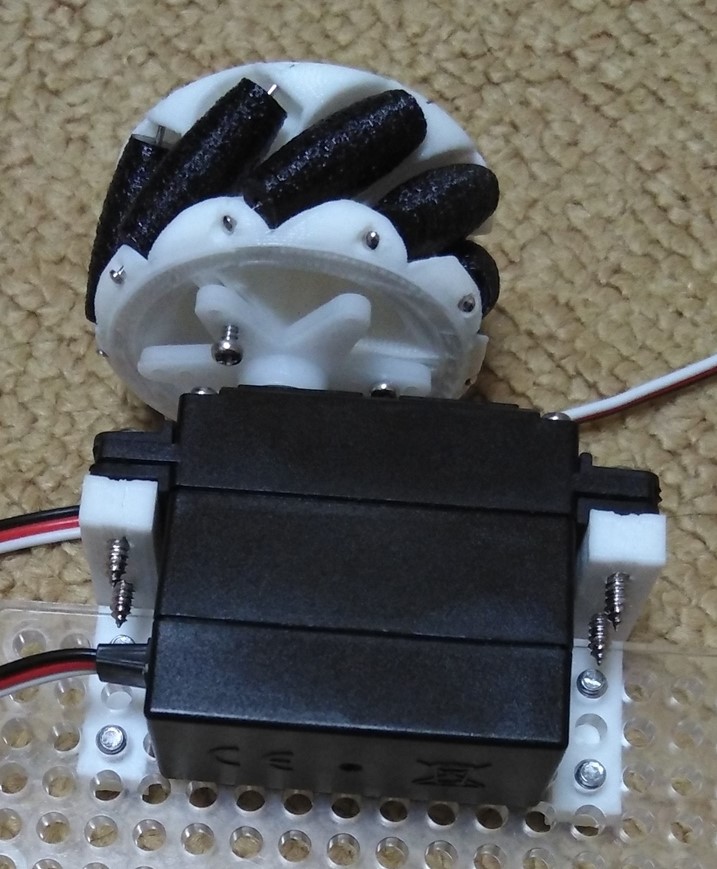
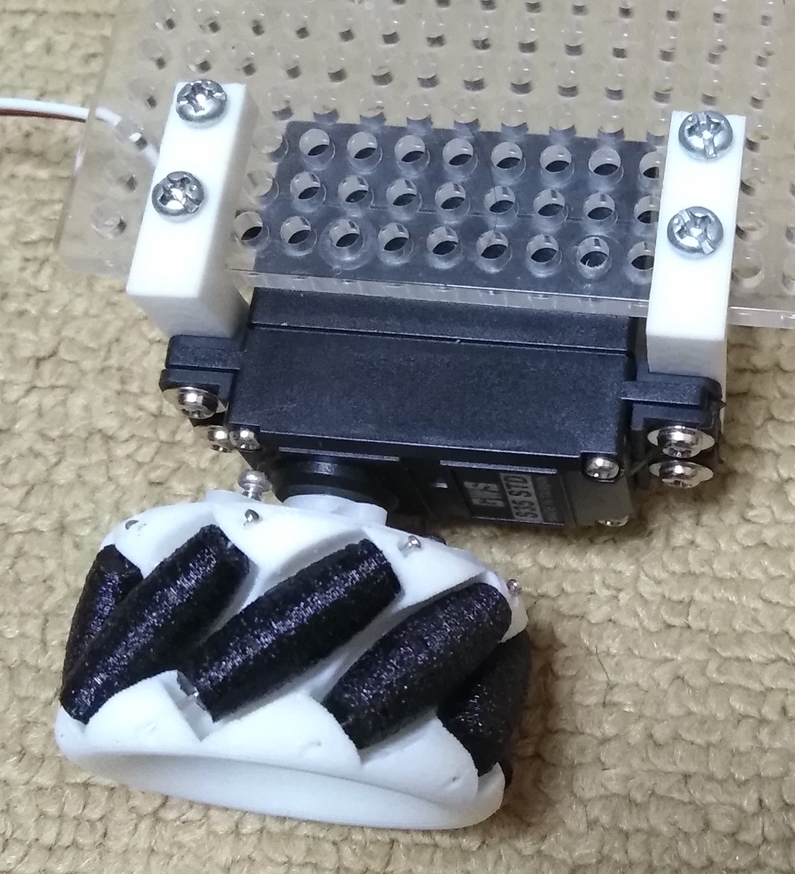
(サーボモータを車体にマウント)
配線
前述の通り、配線はごく単純である。
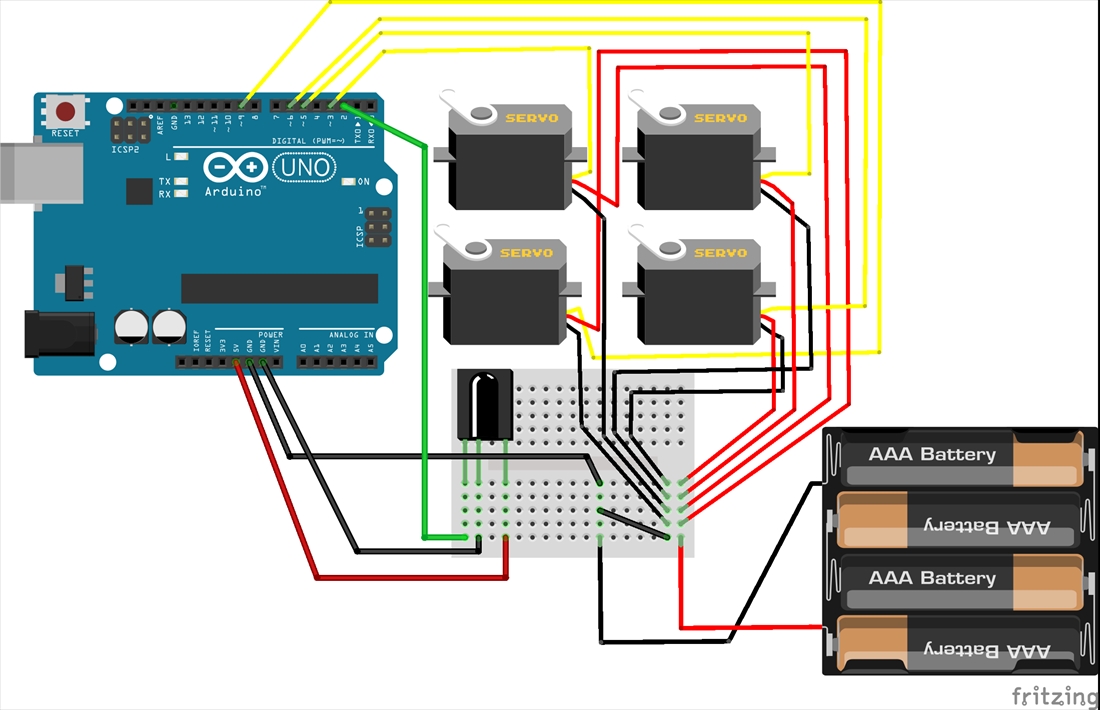
(配線)
スケッチ(プログラム)
#include <Servo.h>
#include <IRremote.h>
const int RECV_PIN = 2;
Servo F_R;
Servo F_L;
Servo B_R;
Servo B_L;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
F_R.attach(3);
F_L.attach(5);
B_R.attach(6);
B_L.attach(9);
}
void loop(){
if (irrecv.decode(&results)) {
Serial.println(results.value);
receive();
irrecv.resume();
}
}
void receive() {
switch (results.value) {
case 16724175: //リモコンボタン:1
DG_UL();
break;
case 16718055: //リモコンボタン:2
FW();
break;
case 16743045: //リモコンボタン:3
DG_UR();
break;
case 16716015: //リモコンボタン:4
SW_L();
break;
case 16726215: //リモコンボタン:5
ST();
break;
case 16734885: //リモコンボタン:6
SW_R();
break;
case 16728765: //リモコンボタン:7
DG_DL();
break;
case 16730805: //リモコンボタン:8
BK();
break;
case 16732845: //リモコンボタン:9
DG_DR();
break;
case 16738455: //リモコンボタン:0
TR();
break;
case 16756815: //リモコンボタン:200+
TL();
break;
}
}
void FW() { //前進
Serial.println("forward");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(3000);
}
void TR() { //右旋回
Serial.println("turn right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(3000);
}
void TL() { //左旋回
Serial.println("turn left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(0);
}
void BK() { //後退
Serial.println("back");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(0);
}
void SW_R() { //右移動
Serial.println("side way right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(0);
}
void SW_L() { //左移動
Serial.println("side way left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(3000);
}
void DG_UR() { //右斜め前方移動
Serial.println("diagonal up right");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(1500);
}
void DG_UL() { //左斜め前方移動
Serial.println("diagonal up left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(3000);
}
void DG_DR() { //右斜め後方移動
Serial.println("diagonal down right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(0);
}
void DG_DL() { //左斜め後方移動
Serial.println("diagonal down left");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(1500);
}
void ST() { //停止
Serial.println("stop");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(1500);
}
感想
自作マウントパーツの調整(ネジ穴の位置、大きさ等)に時間がかかったが、その他は割とスムーズにできた。
念願だった真横の移動や斜めの移動ができたので満足した。
次は、Wi-Fi接続でスマホから操作できるようにしたい。
まとめ
- Arduino Uno互換機を使ってメカナムホイールのラジコンカーを作った
- サーボモータ用のマウントパーツを自作した
- 真横や斜めの移動ができて満足した