25,445 total views, 9 views today
先日、Arduino Uno互換機と赤外線リモコンを使うことによって、メカナムホイールのラジコンカーを作ることに成功した。
しかしながら、2メートルも離れてしまうと操作不能になってしまい、ラジコンとしては残念な感じである。
そこで、今度はWi-Fi越しにスマホなんかで操作できるようにすることにした。
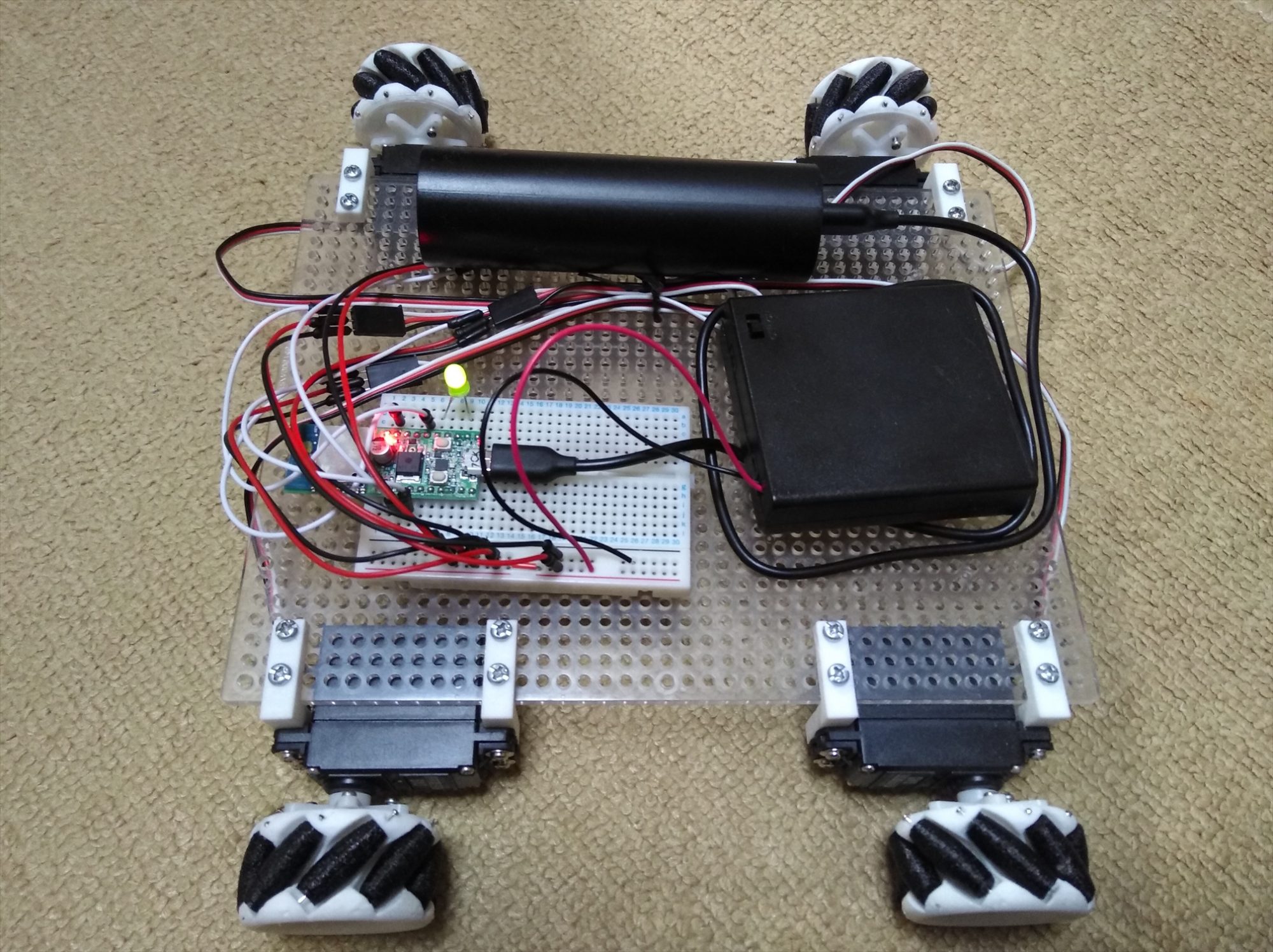
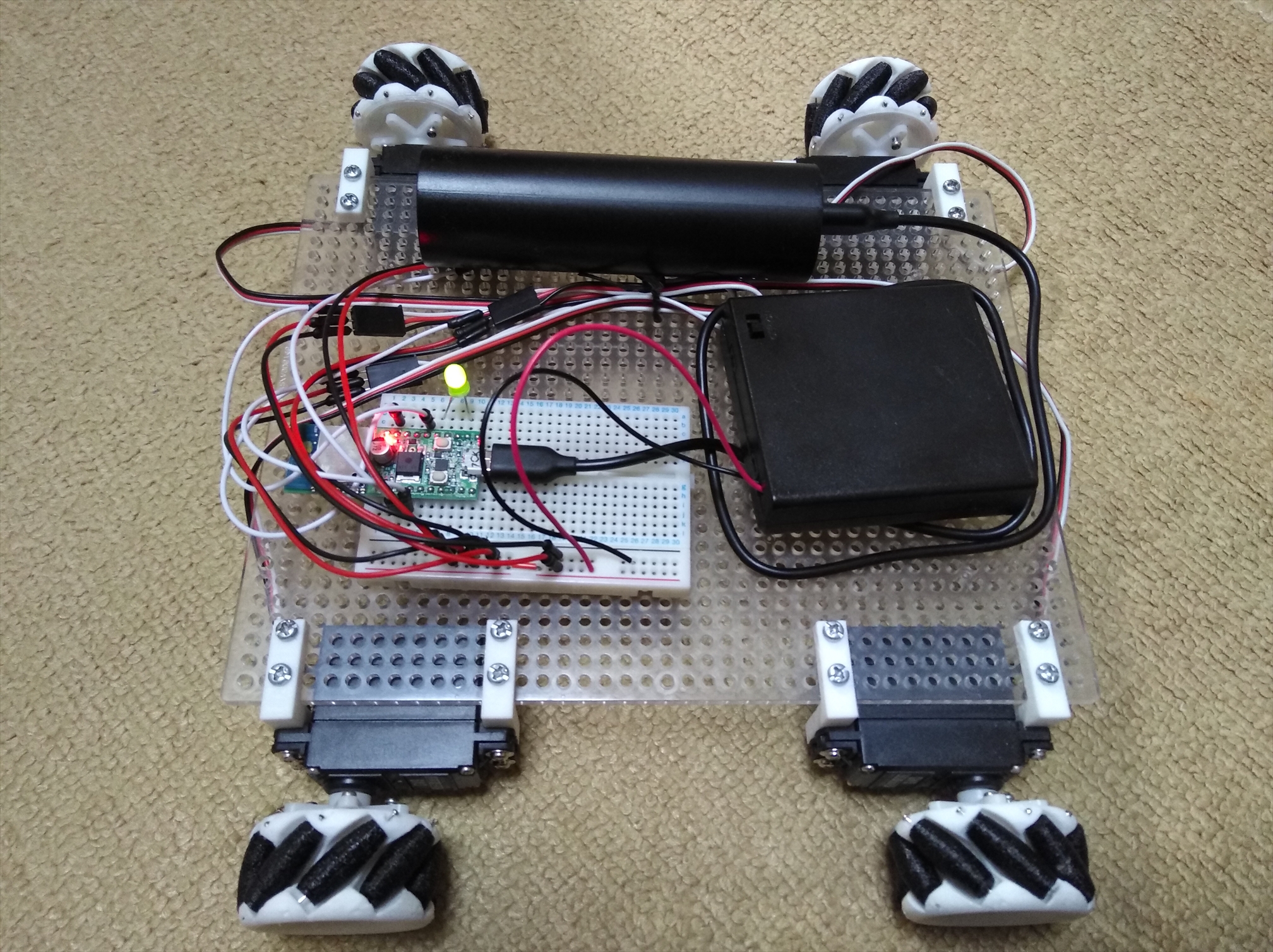
見た目的には、Arduino互換機を使った赤外線ラジコン版とあまり変わらない。
オムニホイールのWi-Fiラジコンカーを3Dプリンターで自作した(ESP32)
Arduino Uno互換機を使ってメカナムホイールのラジコンカーを作った
動作
スマホで操作している様子
ESP-WROOM-02
ESP-WROOM-02は、Arduino IDEの利用が可能な、安価で小型のWi-Fiモジュールである。
Arduino IDEの利用が可能であることから、Arduino Unoとほぼ同じような感覚で、プログラムを組むことができる。
メカナムホイールのWi-Fiラジコン化にあたっては、この安価で導入が容易なESP-WROOM-02を使うことにした。
使用パーツ
使用するパーツについては、Arduino Uno互換機がESP-WROOM-02に置き換わったのと、LEDが1つ追加された以外は、基本的に前回の記事と同様である。
スポンサーリンク
配線

プログラム
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
#include <Servo.h>
const char* ssid = "nova";
const char* password = "novanova";
const int PIN_LED = 4;
Servo F_R;
Servo F_L;
Servo B_R;
Servo B_L;
String html = "";
ESP8266WebServer server(80);
void setup(void){
pinMode(PIN_LED, OUTPUT);
digitalWrite(PIN_LED, LOW);
F_R.attach(14);
F_L.attach(12);
B_R.attach(16);
B_L.attach(5);
html = "<!DOCTYPE html>\
<html>\
<head>\
<meta charset=\"UTF-8\">\
<meta name=\"viewport\" content=\"width=device-width,initial-scale=1,minimum-scale=1\">\
<style>\
table td{\
padding:15px;\
}\
</style>\
</head>\
<body>\
<br>\
<br>\
<br>\
<table>\
<tr><td><input type=\"button\" value=\"↖\" style=\"font-size:32px;\" onclick=\"location.href='/upper_left';\"></td><td><input type=\"button\" value=\"↑\" style=\"font-size:32px;\" onclick=\"location.href='/forward';\"></td><td><input type=\"button\" value=\"↗\" style=\"font-size:32px;\" onclick=\"location.href='/upper_right';\"></td></tr>\
<tr><td><input type=\"button\" value=\"←\" style=\"font-size:32px;\" onclick=\"location.href='/left';\"></td><td><input type=\"button\" value=\"■\" style=\"font-size:32px;\" onclick=\"location.href='/stop';\"></td><td><input type=\"button\" value=\"→\" style=\"font-size:32px;\" onclick=\"location.href='/right';\"></td></tr>\
<tr><td><input type=\"button\" value=\"↙\" style=\"font-size:32px;\" onclick=\"location.href='/down_left';\"></td><td><input type=\"button\" value=\"↓\" style=\"font-size:32px;\" onclick=\"location.href='/back';\"></td><td><input type=\"button\" value=\"↘\" style=\"font-size:32px;\" onclick=\"location.href='/down_right';\"></td></tr>\
</table>\
<br>\
<table>\
<tr><td><input type=\"button\" value=\"↺\" style=\"font-size:32px;\" onclick=\"location.href='/turn_left';\"></td><td><input type=\"button\" value=\"↻\" style=\"font-size:32px;\" onclick=\"location.href='/turn_right';\"></td></tr>\
</table>\
</body>\
</html>";
Serial.begin(115200);
// WIFI_AP, WIFI_STA, WIFI_AP_STA or WIFI_OFF
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
// Wifi接続ができるまで待機
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("IPアドレス: ");
Serial.println(WiFi.localIP());
// ローカルネットワーク内のみ有効のmDNS(マルチキャストDNS)を開始
// bool MDNSResponder::begin(const char* hostname){}
if (MDNS.begin("petitmonte")) {
Serial.println("mDNSレスポンダーの開始");
}
// トップページ
server.on("/", [](){
// HTTPステータスコード(200) リクエストの成功
server.send(200, "text/html", html);
});
// 左斜め前方移動
server.on("/upper_left", [](){
UL();
server.send(200, "text/html", html);
});
// 前進
server.on("/forward", [](){
FD();
server.send(200, "text/html", html);
});
// 右斜め前方移動
server.on("/upper_right", [](){
UR();
server.send(200, "text/html", html);
});
// 左移動
server.on("/left", [](){
SL();
server.send(200, "text/html", html);
});
// 停止
server.on("/stop", [](){
ST();
server.send(200, "text/html", html);
});
// 右移動
server.on("/right", [](){
SR();
server.send(200, "text/html", html);
});
// 左斜め後方移動
server.on("/down_left", [](){
LL();
server.send(200, "text/html", html);
});
// 後退
server.on("/back", [](){
BK();
server.send(200, "text/html", html);
});
// 右斜め後方移動
server.on("/down_right", [](){
LR();
server.send(200, "text/html", html);
});
// 左旋回
server.on("/turn_left", [](){
TL();
server.send(200, "text/html", html);
});
// 右旋回
server.on("/turn_right", [](){
TR();
server.send(200, "text/html", html);
});
// 存在しないURLを指定した場合の動作を指定する
server.onNotFound([](){
// HTTPステータスコード(404) 未検出(存在しないファイルにアクセス)
server.send(404, "text/plain", "404");
});
server.begin();
Serial.println("Webサーバーの開始");
digitalWrite(PIN_LED, HIGH); //Wifi接続したらLED点灯
}
void loop(void){
// Webサーバの接続要求待ち
server.handleClient();
}
void UL() {
Serial.println("upper left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(3000);
}
void FD() {
Serial.println("forward");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(3000);
}
void UR() {
Serial.println("upper right");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(1500);
}
void SL() {
Serial.println("sideways left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(3000);
}
void ST() {
Serial.println("stop");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(1500);
}
void SR() {
Serial.println("sideways right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(0);
}
void LL() {
Serial.println("lower left");
F_R.writeMicroseconds(1500);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(1500);
}
void BK() {
Serial.println("backward");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(0);
}
void LR() {
Serial.println("lower right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(1500);
B_R.writeMicroseconds(1500);
B_L.writeMicroseconds(0);
}
void TL() {
Serial.println("turn left");
F_R.writeMicroseconds(0);
F_L.writeMicroseconds(0);
B_R.writeMicroseconds(0);
B_L.writeMicroseconds(0);
}
void TR() {
Serial.println("turn right");
F_R.writeMicroseconds(3000);
F_L.writeMicroseconds(3000);
B_R.writeMicroseconds(3000);
B_L.writeMicroseconds(3000);
}
まとめ
- 赤外線ラジコンのメカナムホイール車をWi-Fiラジコン化した
- Wi-Fiラジコン化には、ESP-WROOM-02を使用した
- 次は、オムニホイール車のWi-Fiラジコンを作る