48,020 total views, 5 views today
メカナムホイールのWi-Fiラジコンを作ったところで、今度はオムニホイールを試してみたくなった。
しかしながら、いつまでもThingiverseでデータを見繕い、それを出力しているだけでは芸がない。
なので、オムニホイールとラジコン本体のフレームについては、3DCADを使って一から自作することにした。
その他のパーツ(モーターなど)については、もちろん既製品を利用する。
Arduino Uno互換機を使ってメカナムホイールのラジコンカーを作った
スマホで操作できるメカナムホイールのWi-Fiラジコンカーを作った(ESP-WROOM-02)
目次
動作
思っていたより軽快に動作したので満足した。
使用パーツ一覧
| パーツ | 使用品 |
|---|---|
| ESP32 | ESP-WROOM-32開発ボード |
| 車体 | 自作パーツ |
| タイヤ | 自作パーツ |
| モーター | プラスチックギヤードモーター |
| モータードライバ | Dual DCモータードライブキット |
| バッテリー | Anker PowerCore 5000 |
| 電池ケース | 単3×4 スイッチ・カバー付 |
| ブレッドボード | SAD-101 ニューブレッドボード |
| ジャンパワイヤ | オス-オス |
自作オムニホイール
ホイールの設計
Fusion360を使って、オムニホイールを設計した。
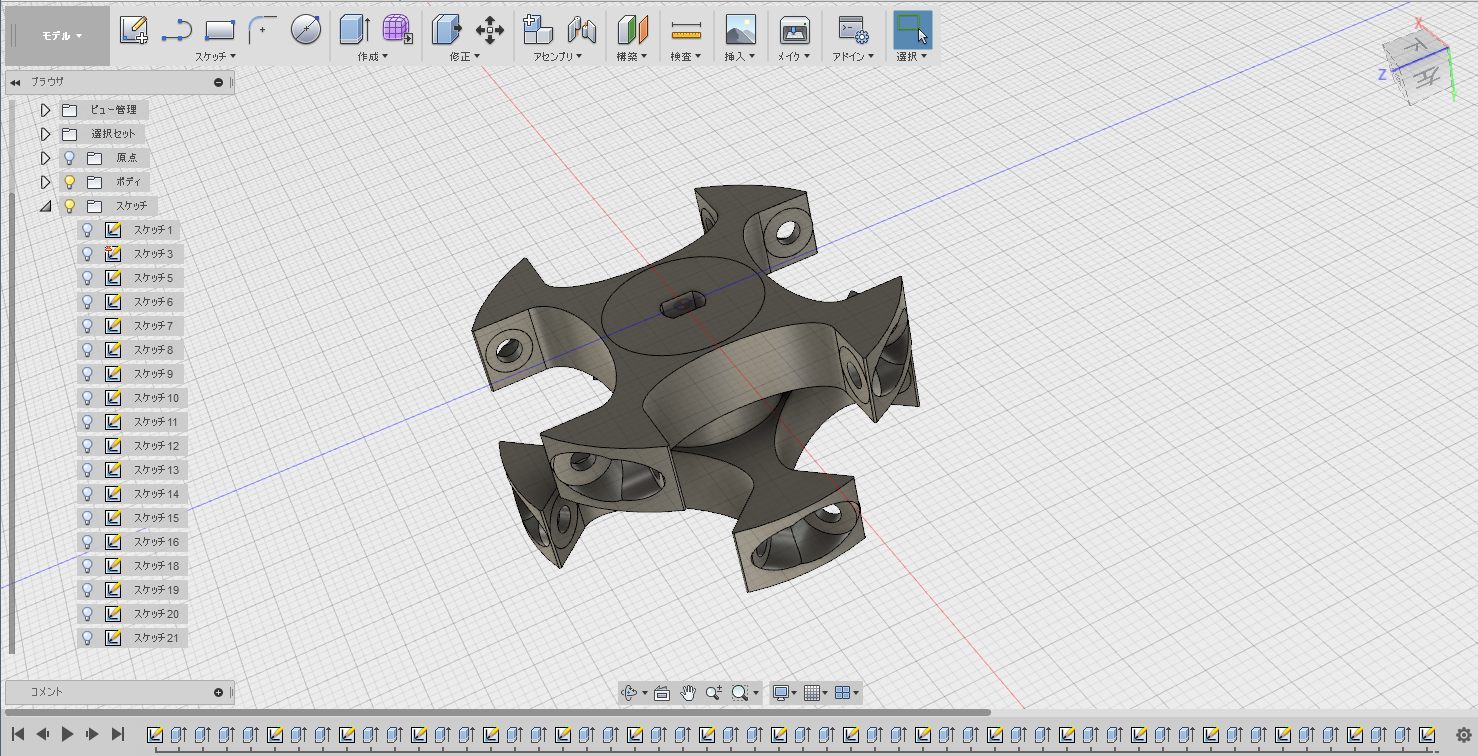
(ホイール本体)
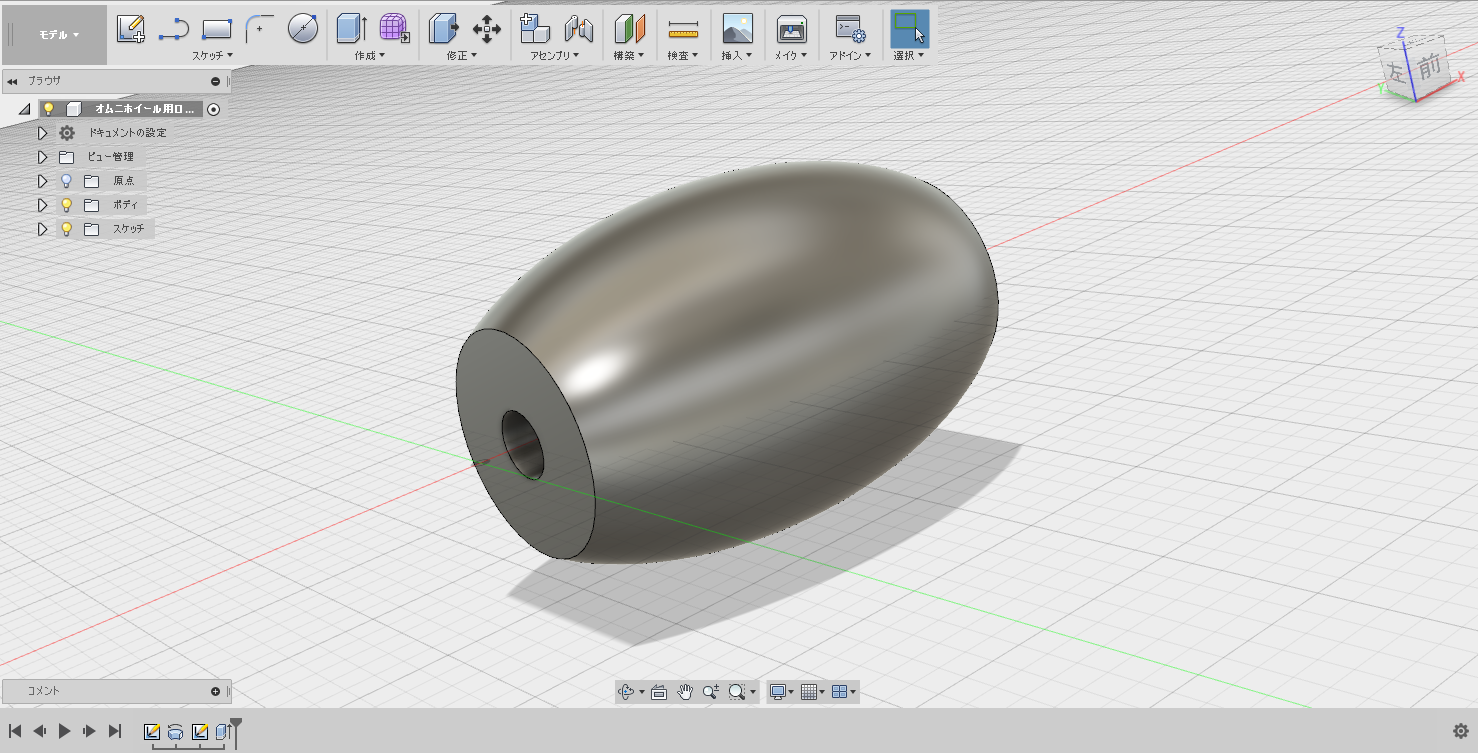
(ローラー)
今回の経験により、わりと複雑な形のものでも自力で設計できるようになってきた。
Thingiverse:4WD Omni Wheel Robot Car
ホイールの出力
設計したオムニホイールを3Dプリンタで出力した。ちなみに、ホイールはPLAで、ローラーはTPUで出力した。

(ホイール外側)

(ホイール内側)

(ローラー面)

(ローラー)
自作フレーム
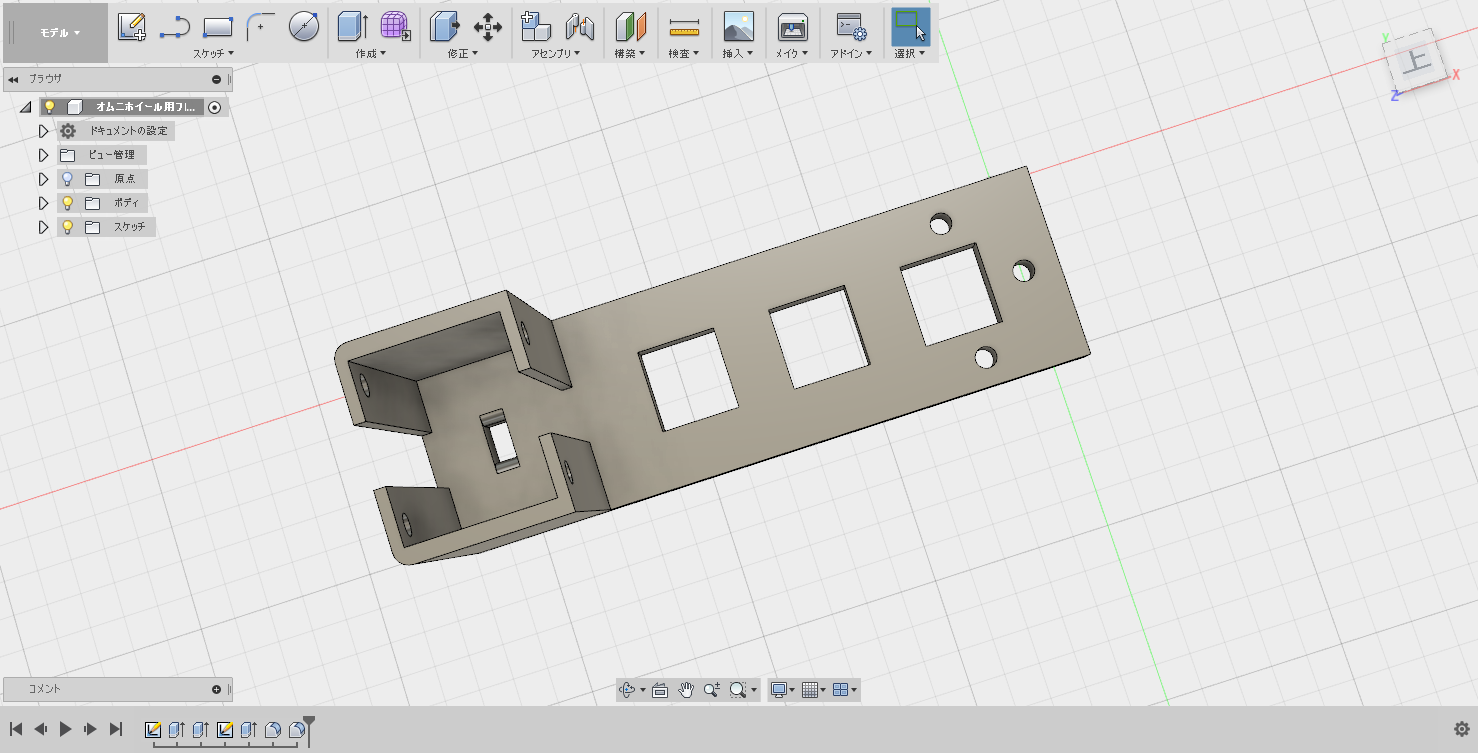
フレームの設計
ラジコンを作るにあたって、フレームも自作してみた。
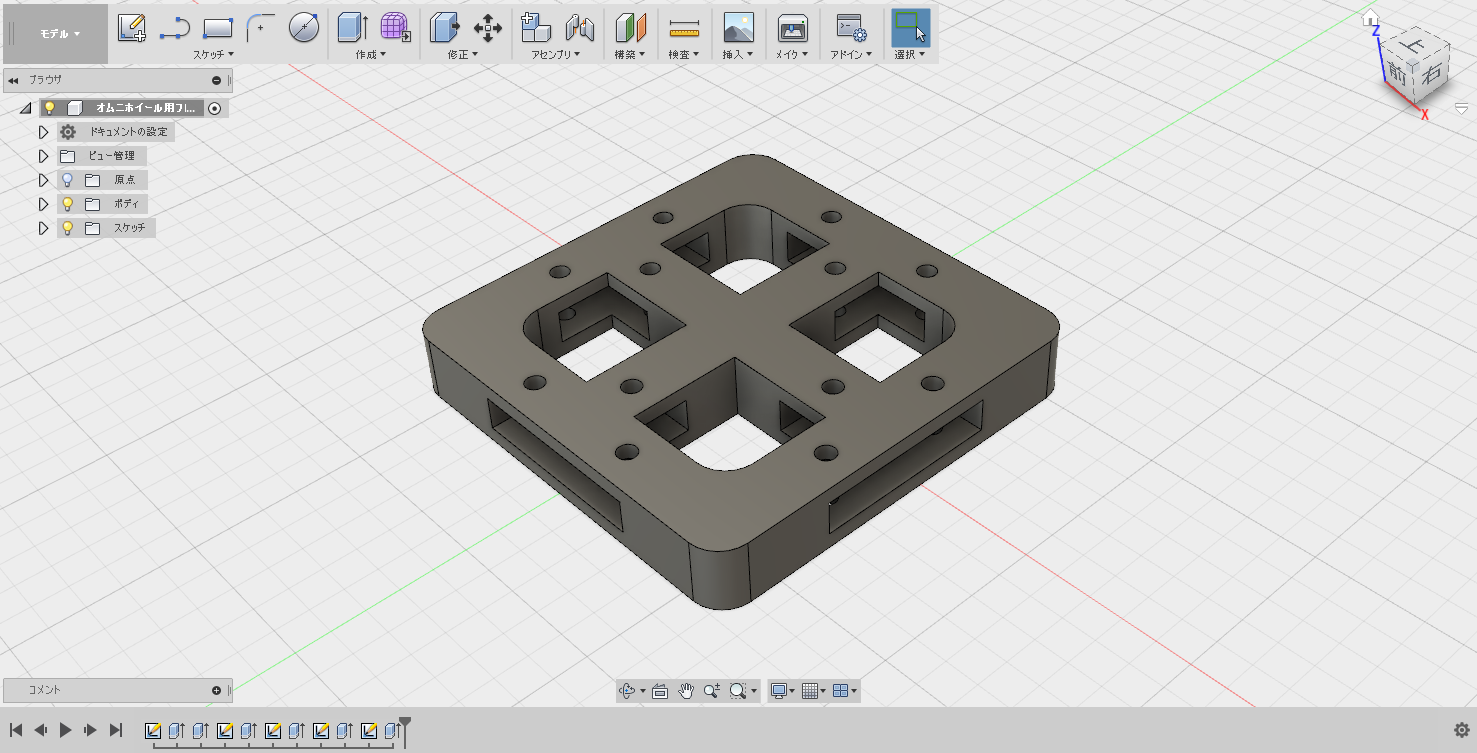
(フレーム本体部)
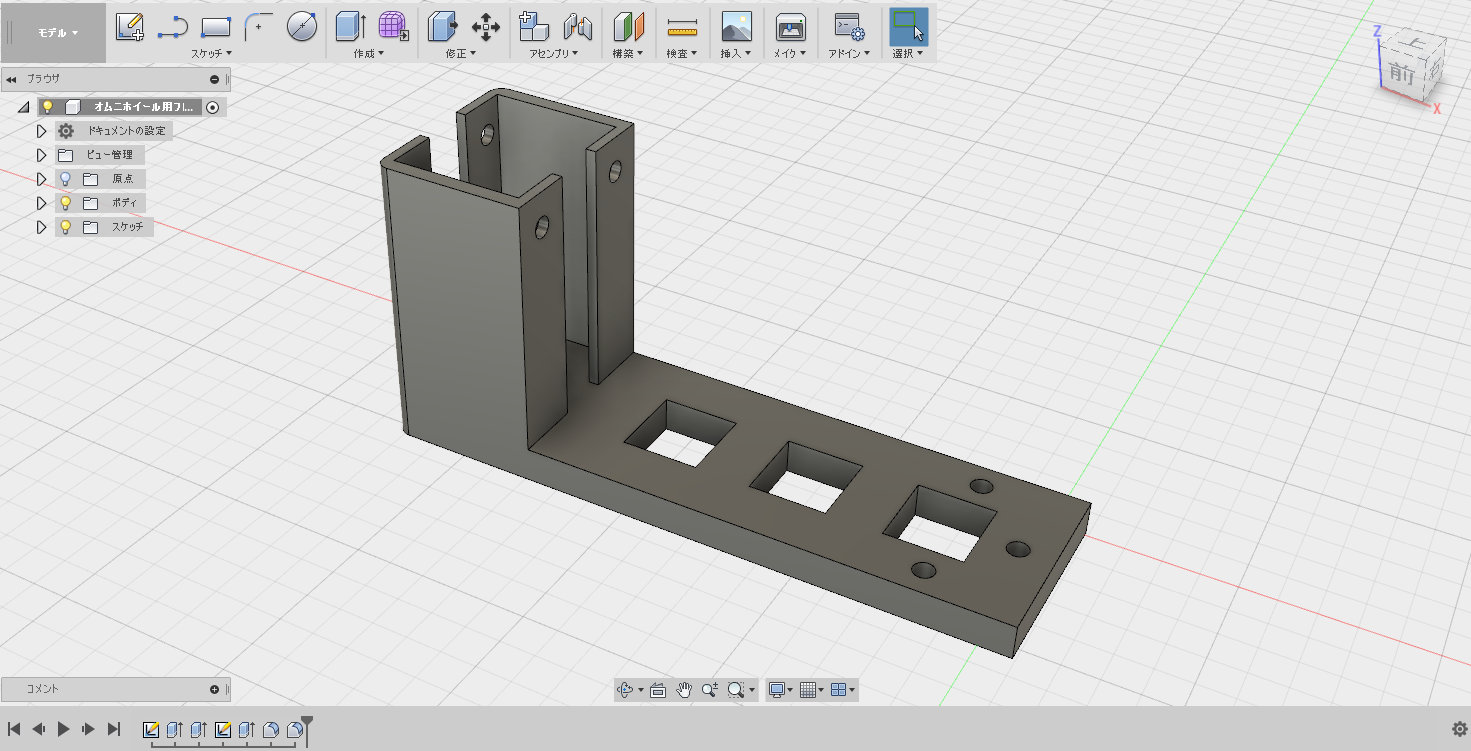
(モーターマウント部)
Thingiverse:4WD Omni Wheel Robot Car
フレームの出力
設計したフレームを3Dプリンタで出力した。
スポンサーリンク
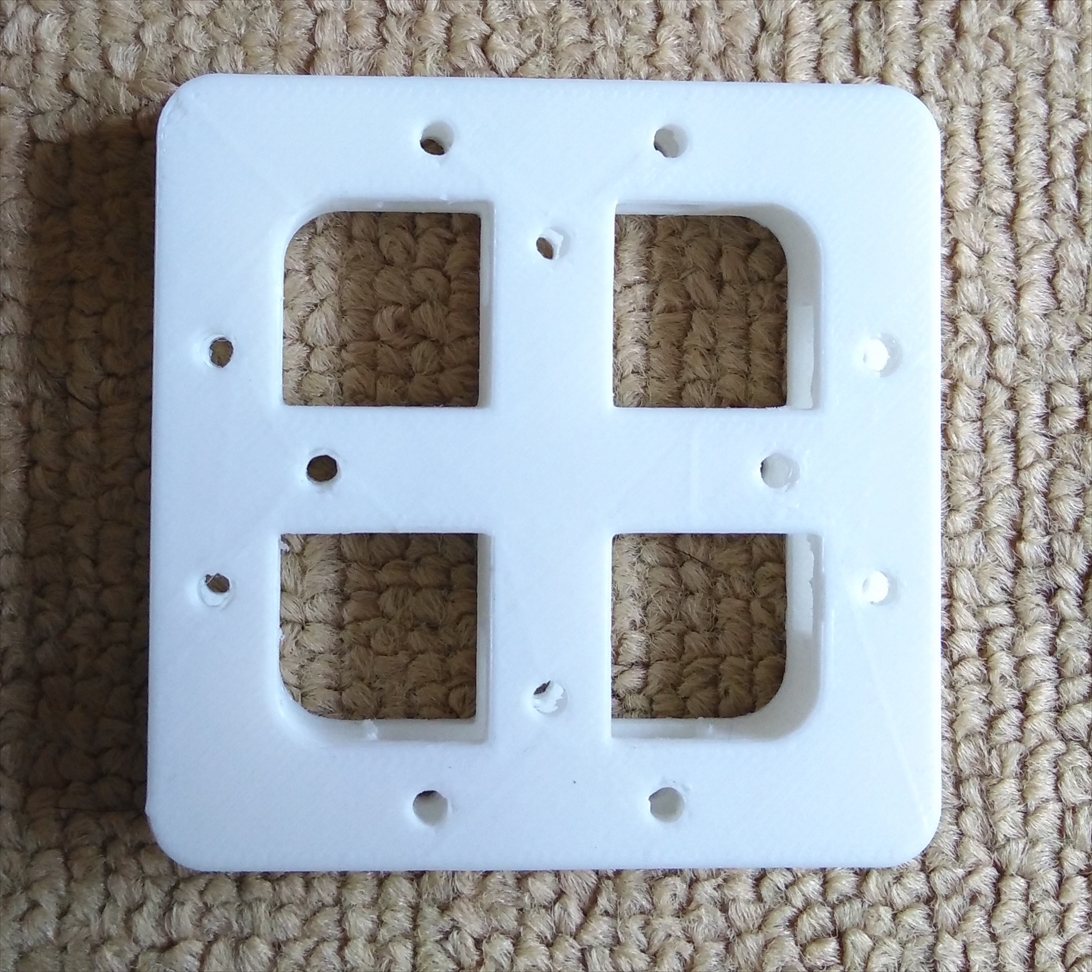
(フレーム本体)
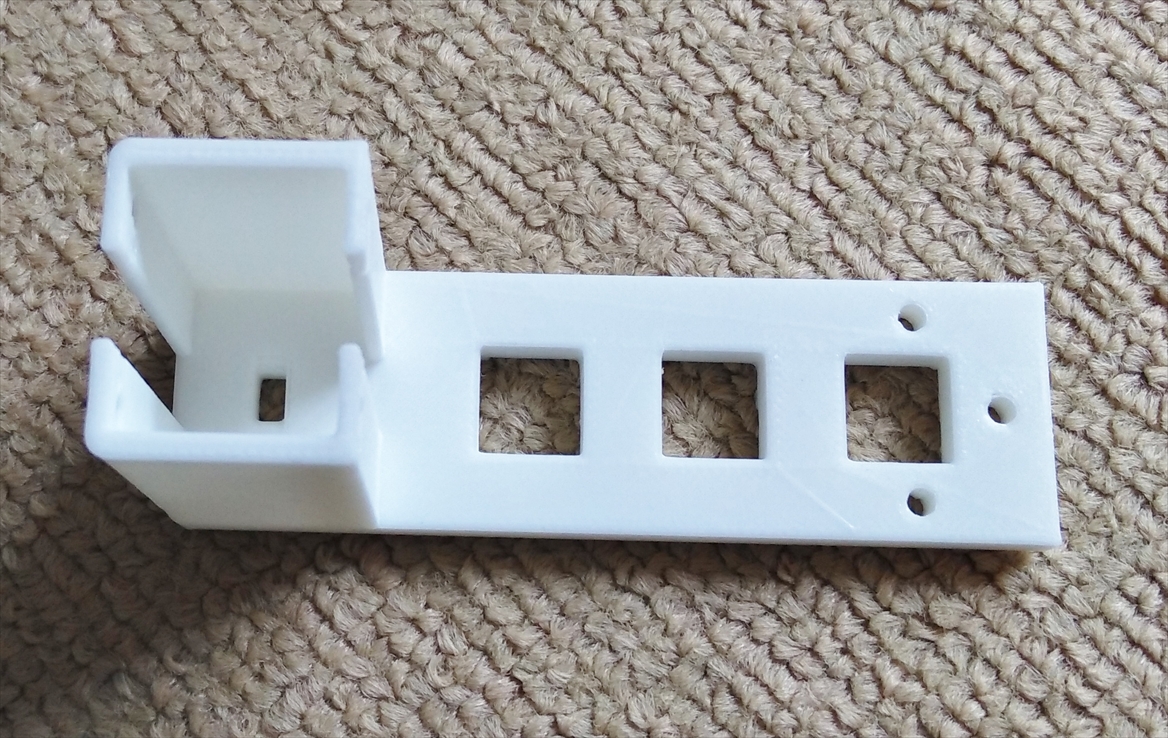
(モーターマウント部)
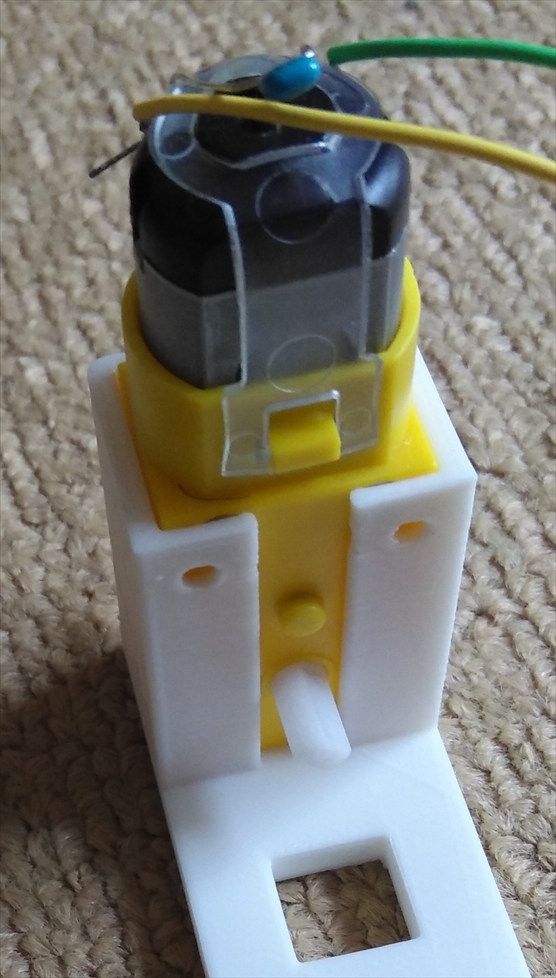
(モーターをマウントした状態)
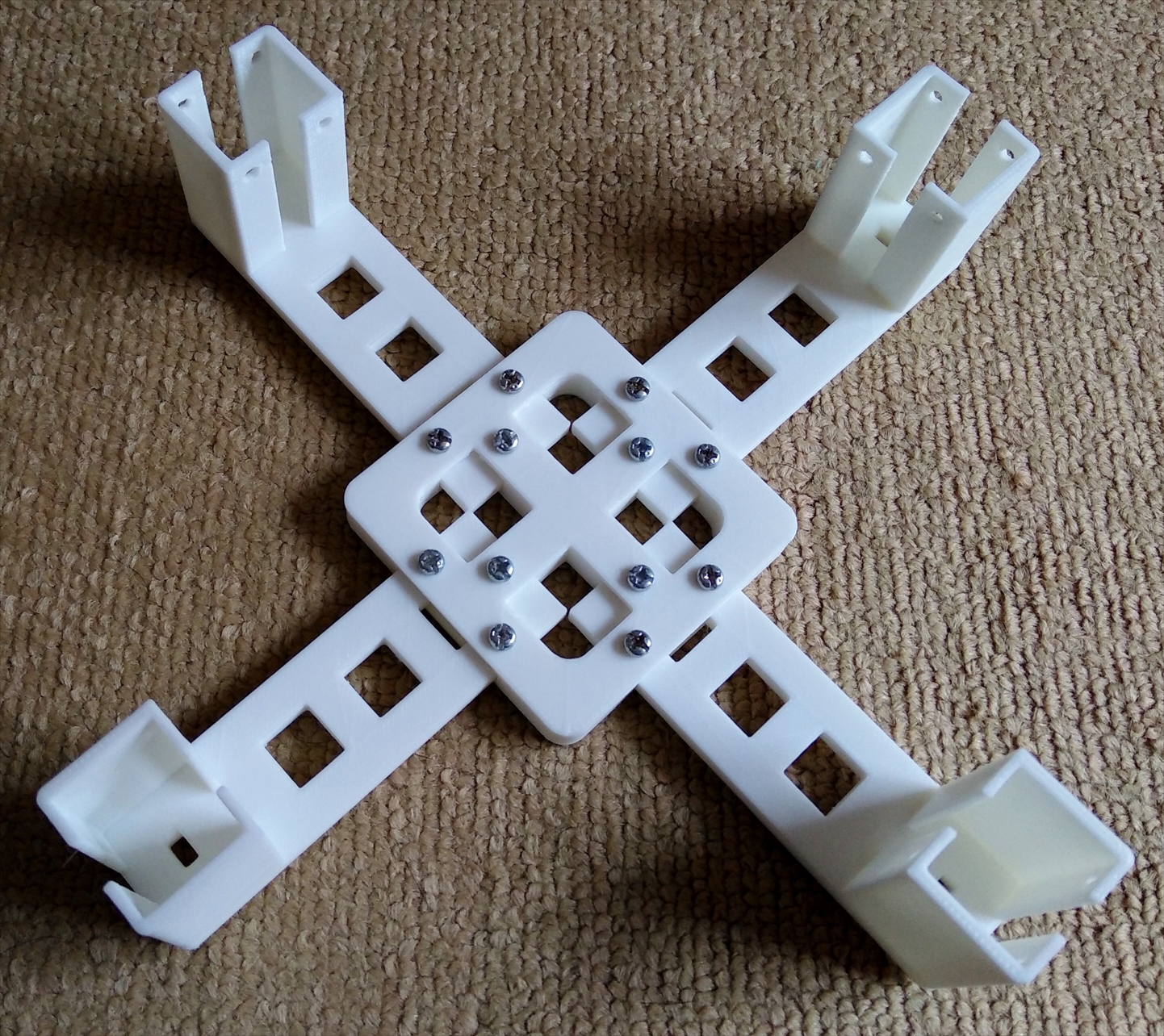
(フレームを組み立てた状態)
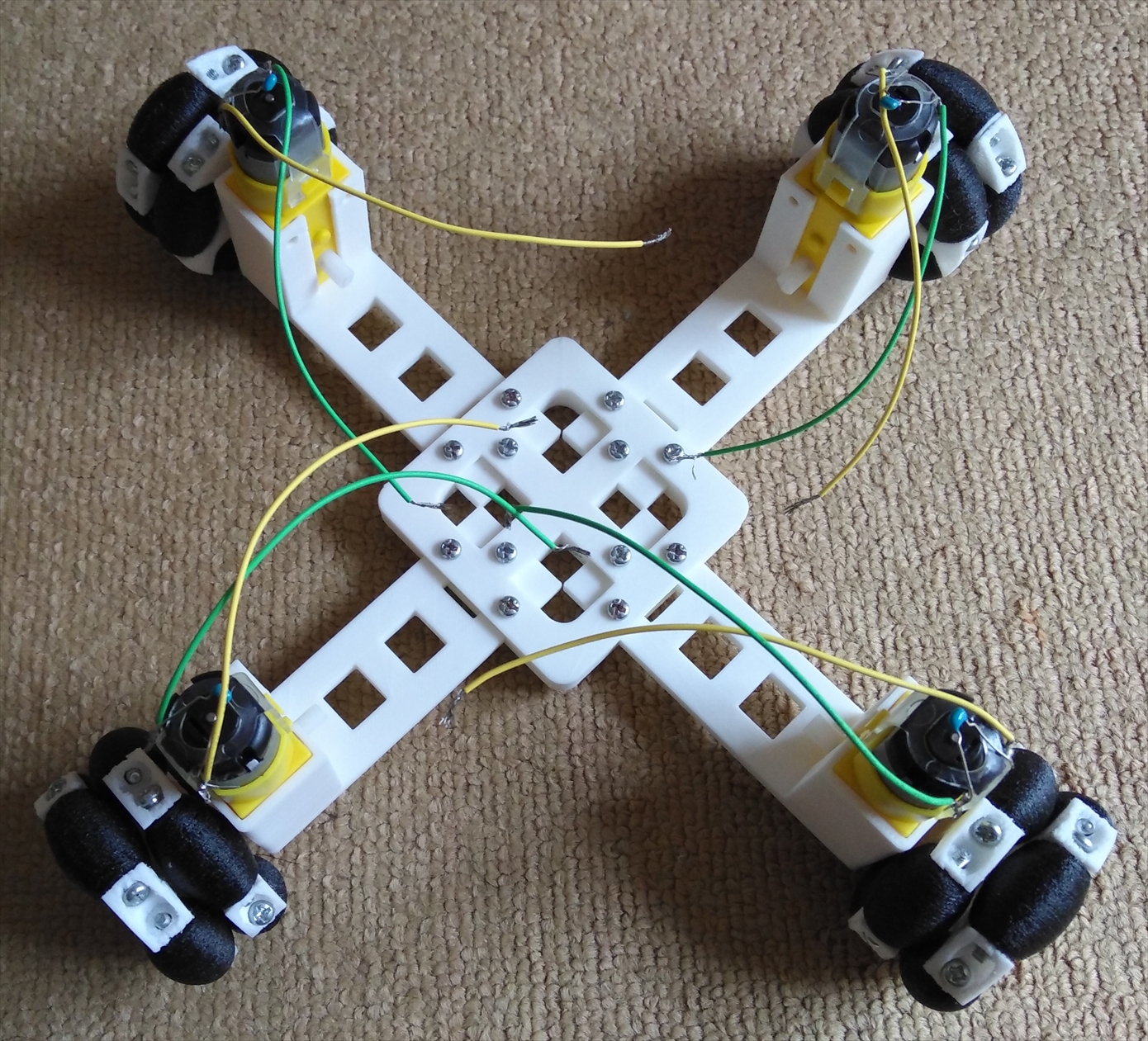
(オムニホイールとモーターを組み付けた状態)
1台目としておすすめの3Dプリンター(半完成品でほとんど組立不要)
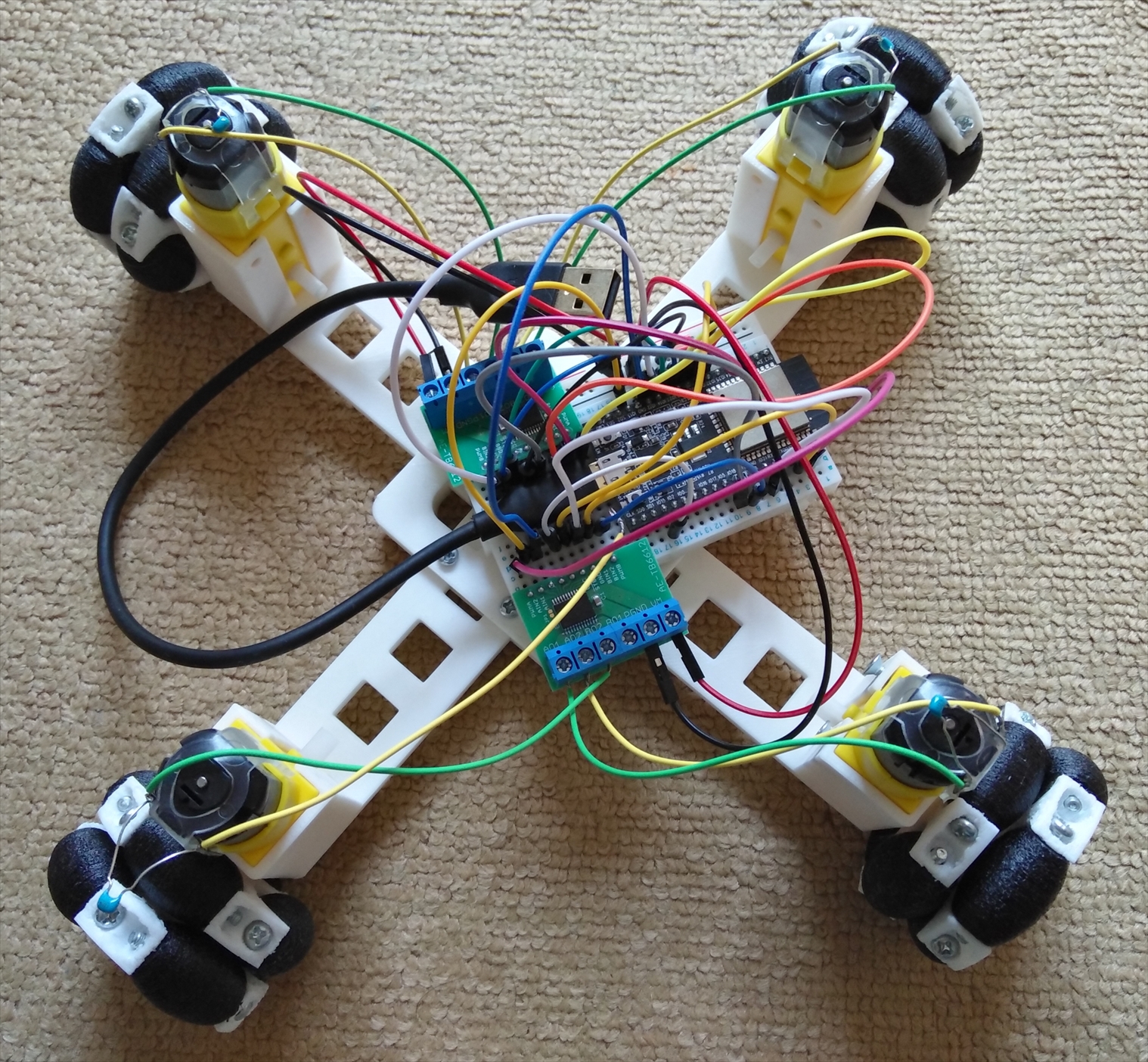
配線
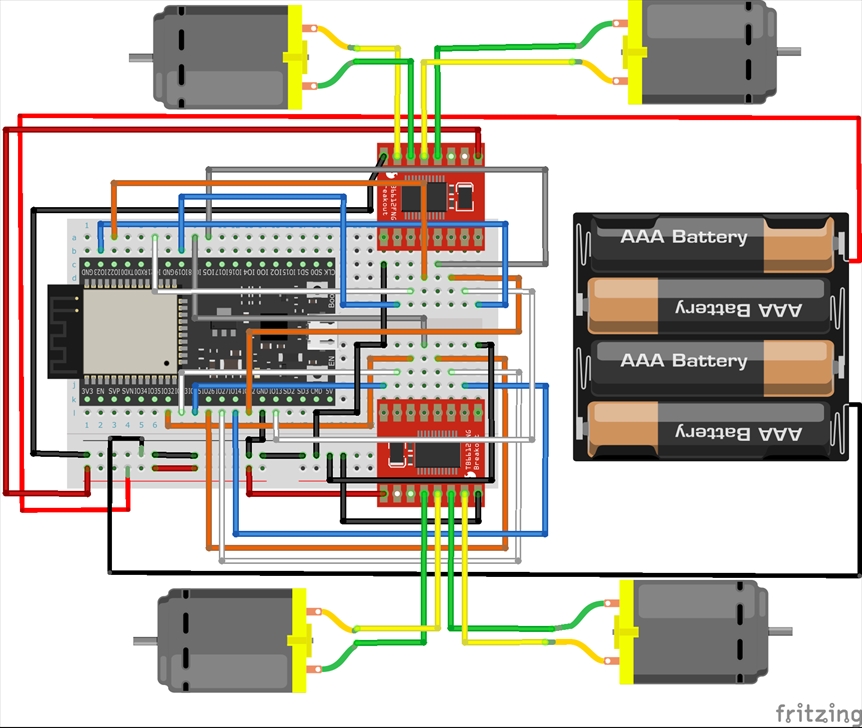
本体完成
配線を終え、本体が完成した。
プログラム
#include <WiFi.h>
const char* ssid = "nova";
const char* password = "novanova";
const int AIN1_UL = 32;
const int AIN2_UL = 33;
const int PWMA_UL = 25;
const int BIN1_DL = 26;
const int BIN2_DL = 27;
const int PWMB_DL = 14;
const int AIN1_UR = 12;
const int AIN2_UR = 13;
const int PWMA_UR = 23;
const int BIN1_DR = 22;
const int BIN2_DR = 21;
const int PWMB_DR = 19;
const int STBY_L = 18;
const int STBY_R = 5;
const int CHANNEL_0 = 0;
const int CHANNEL_1 = 1;
const int CHANNEL_2 = 2;
const int CHANNEL_3 = 3;
const int LEDC_TIMER_BIT = 8; // PWMの範囲(8bitなら0〜255、10bitなら0〜1023)
const int LEDC_BASE_FREQ = 490; // 周波数(Hz)
const int VALUE_MAX = 255; // PWMの最大値
WiFiServer server(80);
/*void ledcAnalogWrite(uint8_t channel, uint32_t value, uint32_t valueMax = 255) {
// calculate duty, 8191 from 2 ^ 13 - 1
uint32_t duty = (8191 / valueMax) * min(value, valueMax);
// write duty to LEDC
ledcWrite(channel, duty);
}*/
void setup() {
Serial.begin(115200);
pinMode(AIN1_UL,OUTPUT);
pinMode(AIN2_UL,OUTPUT);
pinMode(BIN1_DL,OUTPUT);
pinMode(BIN2_DL,OUTPUT);
pinMode(AIN1_UR,OUTPUT);
pinMode(AIN2_UR,OUTPUT);
pinMode(BIN1_DR,OUTPUT);
pinMode(BIN2_DR,OUTPUT);
pinMode(STBY_L,OUTPUT);
pinMode(STBY_R,OUTPUT);
ledcSetup(CHANNEL_0, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcSetup(CHANNEL_1, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcSetup(CHANNEL_2, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcSetup(CHANNEL_3, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcAttachPin(PWMA_UL, CHANNEL_0);
ledcAttachPin(PWMB_DL, CHANNEL_1);
ledcAttachPin(PWMA_UR, CHANNEL_2);
ledcAttachPin(PWMB_DR, CHANNEL_3);
delay(10);
// We start by connecting to a WiFi network
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected.");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
server.begin();
digitalWrite(STBY_L, HIGH);
digitalWrite(STBY_R, HIGH);
}
int value = 0;
void loop(){
WiFiClient client = server.available(); // listen for incoming clients
if (client) { // if you get a client,
Serial.println("New Client."); // print a message out the serial port
String currentLine = ""; // make a String to hold incoming data from the client
while (client.connected()) { // loop while the client's connected
if (client.available()) { // if there's bytes to read from the client,
char c = client.read(); // read a byte, then
Serial.write(c); // print it out the serial monitor
if (c == '\n') { // if the byte is a newline character
// if the current line is blank, you got two newline characters in a row.
// that's the end of the client HTTP request, so send a response:
if (currentLine.length() == 0) {
// HTTP headers always start with a response code (e.g. HTTP/1.1 200 OK)
// and a content-type so the client knows what's coming, then a blank line:
client.println("HTTP/1.1 200 OK");
client.println("Content-type:text/html");
client.println();
// the content of the HTTP response follows the header:
client.print("<html>");
client.print("<head>");
client.print("<meta charset=\"UTF-8\">");
client.print("<meta name=\"viewport\" content=\"width=device-width,initial-scale=1,minimum-scale=1\">");
client.print("<style>");
client.print("table td{ padding:15px; }");
client.print("</style>");
client.print("</head>");
client.print("<body>");
client.print("<table>");
client.print("<tbody align=\"center\">");
client.print("<tr><td><input type=\"button\" value=\"⇖\" style=\"font-size:32px;\" onclick=\"location.href='/UL';\"></td>");
client.print("<td><input type=\"button\" value=\"⇑\" style=\"font-size:32px;\" onclick=\"location.href='/FW';\"></td>");
client.print("<td><input type=\"button\" value=\"⇗\" style=\"font-size:32px;\" onclick=\"location.href='/UR';\"></td>");
client.print("<tr><td><input type=\"button\" value=\"⇐\" style=\"font-size:32px;\" onclick=\"location.href='/SL';\"></td>");
client.print("<td><input type=\"button\" value=\"■\" style=\"font-size:32px;\" onclick=\"location.href='/ST';\"></td>");
client.print("<td><input type=\"button\" value=\"⇒\" style=\"font-size:32px;\" onclick=\"location.href='/SR';\"></td>");
client.print("<tr><td><input type=\"button\" value=\"⇙\" style=\"font-size:32px;\" onclick=\"location.href='/LL';\"></td>");
client.print("<td><input type=\"button\" value=\"⇓\" style=\"font-size:32px;\" onclick=\"location.href='/BK';\"></td>");
client.print("<td><input type=\"button\" value=\"⇘\" style=\"font-size:32px;\" onclick=\"location.href='/LR';\"></td>");
client.print("</tbody>");
client.print("</table>");
client.print("<table>");
client.print("<tbody align=\"center\">");
client.print("<tr><td><input type=\"button\" value=\"↻\" style=\"font-size:32px;\" onclick=\"location.href='/TR';\"></td>");
client.print("<td><input type=\"button\" value=\"↺\" style=\"font-size:32px;\" onclick=\"location.href='/TL';\"></td>");
client.print("</tbody>");
client.print("</table>");
client.print("</body>");
client.print("</html>");
// The HTTP response ends with another blank line:
client.println();
// break out of the while loop:
break;
} else { // if you got a newline, then clear currentLine:
currentLine = "";
}
} else if (c != '\r') { // if you got anything else but a carriage return character,
currentLine += c; // add it to the end of the currentLine
}
// Check to see if the client request was "GET /H" or "GET /L":
if (currentLine.endsWith("GET /UL")) {
UL(200); // 左斜め前
}
if (currentLine.endsWith("GET /FW")) {
FW(200); // 前進
}
if (currentLine.endsWith("GET /UR")) {
UR(200); // 右斜め前
}
if (currentLine.endsWith("GET /SL")) {
SL(200); // 左
}
if (currentLine.endsWith("GET /ST")) {
ST(); // 停止
}
if (currentLine.endsWith("GET /SR")) {
SR(200); // 右
}
if (currentLine.endsWith("GET /LL")) {
LL(200); // 左斜め後ろ
}
if (currentLine.endsWith("GET /BK")) {
BK(200); // 後退
}
if (currentLine.endsWith("GET /LR")) {
LR(200); // 右斜め後ろ
}
if (currentLine.endsWith("GET /TR")) {
TR(200); // 右旋回
}
if (currentLine.endsWith("GET /TL")) {
TL(200); // 左旋回
}
}
}
// close the connection:
client.stop();
Serial.println("Client Disconnected.");
}
}
void FW(int pwm) {
Serial.println("forward");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, HIGH);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, HIGH);
digitalWrite(AIN1_UR, HIGH);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, HIGH);
digitalWrite(BIN2_DR, LOW);
}
void TR(int pwm) {
Serial.println("turn right");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, HIGH);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, HIGH);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, HIGH);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, HIGH);
}
void TL(int pwm) {
Serial.println("turn left");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, HIGH);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, HIGH);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, HIGH);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, HIGH);
digitalWrite(BIN2_DR, LOW);
}
void BK(int pwm) {
Serial.println("back");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, HIGH);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, HIGH);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, HIGH);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, HIGH);
}
void SR(int pwm) {
Serial.println("sideways right");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, HIGH);
digitalWrite(BIN1_DL, HIGH);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, HIGH);
digitalWrite(BIN1_DR, HIGH);
digitalWrite(BIN2_DR, LOW);
}
void SL(int pwm) {
Serial.println("sideways left");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, HIGH);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, HIGH);
digitalWrite(AIN1_UR, HIGH);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, HIGH);
}
void UR(int pwm) {
Serial.println("upper right");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, HIGH);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, HIGH);
digitalWrite(BIN2_DR, LOW);
}
void UL(int pwm) {
Serial.println("uppper left");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, HIGH);
digitalWrite(AIN1_UR, HIGH);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, LOW);
}
void LR(int pwm) {
Serial.println("lower right");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, HIGH);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, HIGH);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, LOW);
}
void LL(int pwm) {
Serial.println("lower left");
if (pwm > VALUE_MAX) {
pwm = VALUE_MAX;
}
ledcWrite(CHANNEL_0, pwm);
ledcWrite(CHANNEL_1, pwm);
ledcWrite(CHANNEL_2, pwm);
ledcWrite(CHANNEL_3, pwm);
digitalWrite(AIN1_UL, HIGH);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, HIGH);
}
void ST() {
Serial.println("stop");
digitalWrite(AIN1_UL, LOW);
digitalWrite(AIN2_UL, LOW);
digitalWrite(BIN1_DL, LOW);
digitalWrite(BIN2_DL, LOW);
digitalWrite(AIN1_UR, LOW);
digitalWrite(AIN2_UR, LOW);
digitalWrite(BIN1_DR, LOW);
digitalWrite(BIN2_DR, LOW);
}
まとめ
- オムニホイールを自作した
- 自作オムニホイールを使ってWi-Fiラジコンを作った
- 次は、ドローンを作る
“オムニホイールのWi-Fiラジコンカーを3Dプリンターで自作した(ESP32)” への1件のフィードバック